RoboCup Basketball Robot
Introduction
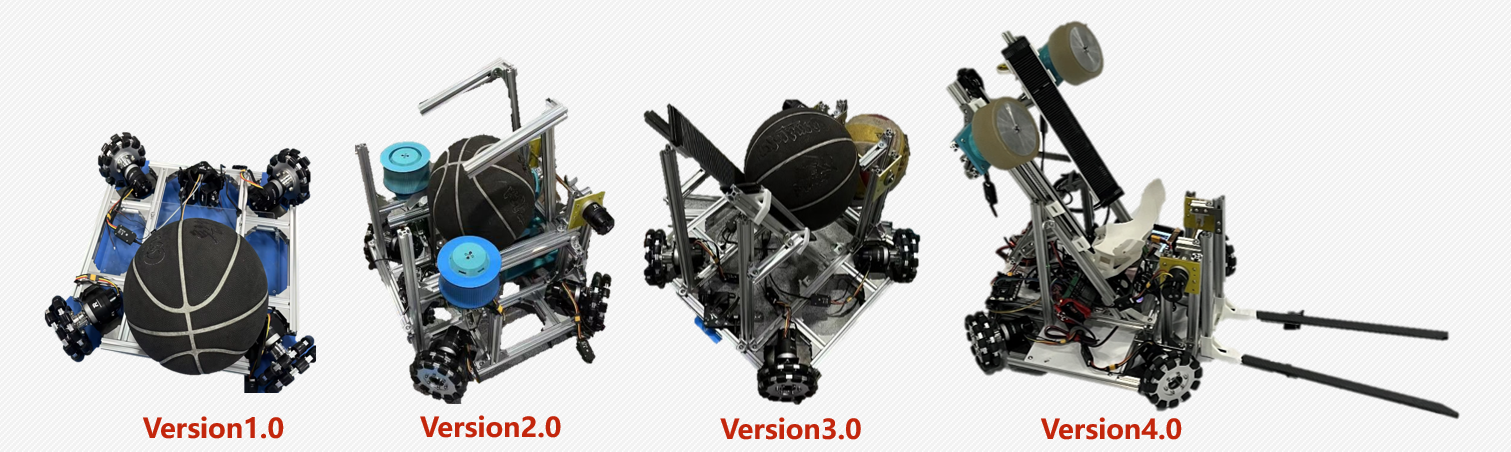
Developed an autonomous basketball robot utilizing multi-sensor fusion and object recognition. The system employs YOLOv8 for real-time target detection, coordinates chassis movement via the OPS9 positioning system, and executes ball collection using M3508 motors. Final launching is achieved by precisely modulating the rotational speed of a dual-friction-wheel mechanism.
Showcase
Starting from scratch is often the greatest challenge.
Reflections
It’s a pity I couldn’t compete in person. The inaugural year was truly a grueling journey.
Although we only secured the National Third Prize, I hope the future iterations will keep getting better and better.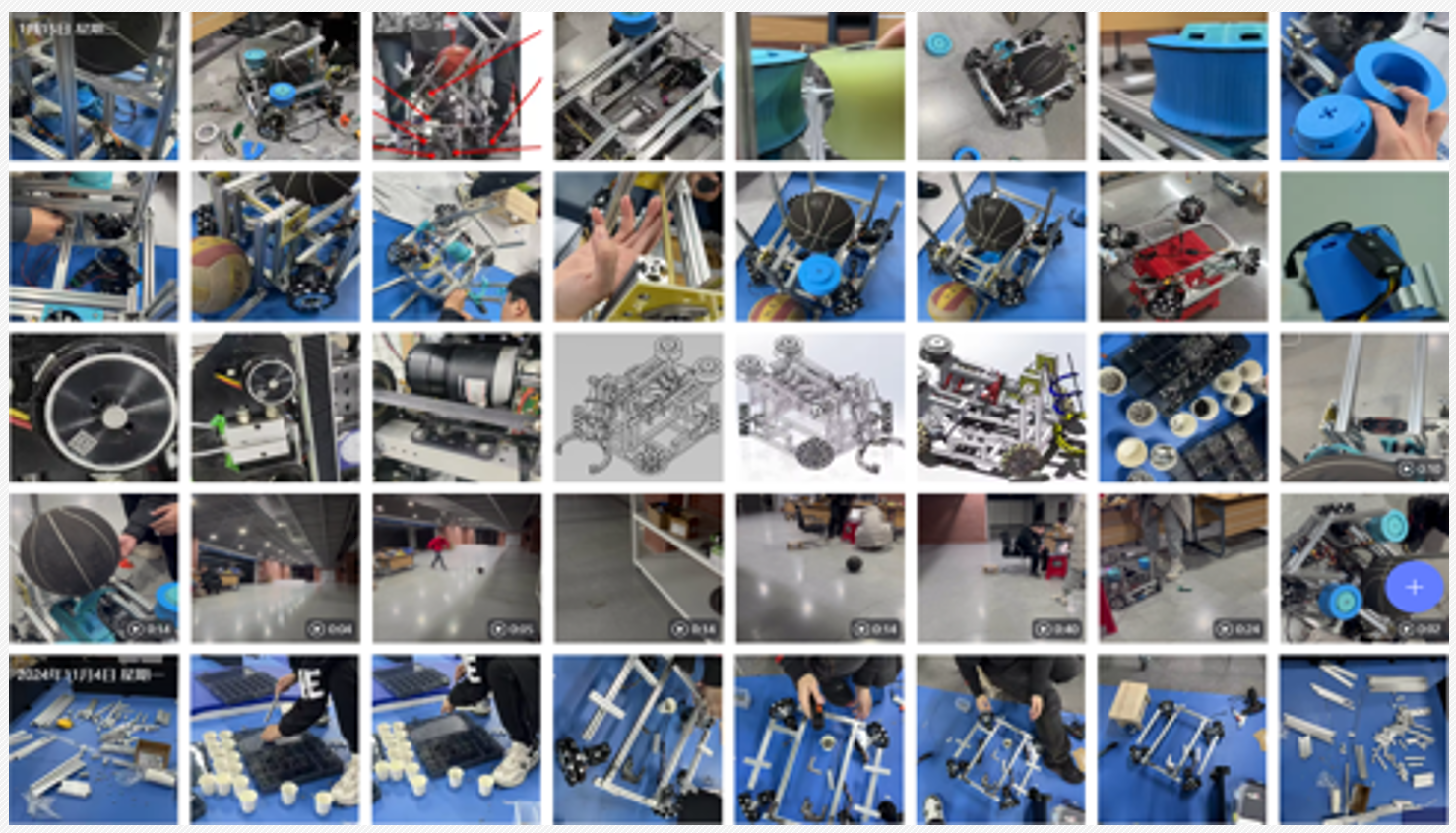
Open Source
Link:

