RoboCup篮球机器人
研发了一款基于多传感器与目标识别的自主篮球机器人。机器人首先通过YOLO v8视觉检测篮球位置,然后控制底盘移动至篮球位置并使用OPS9系统进行定位,控制M3508电机绕轴旋转进行拾球、调整双摩擦轮转速进行发射。
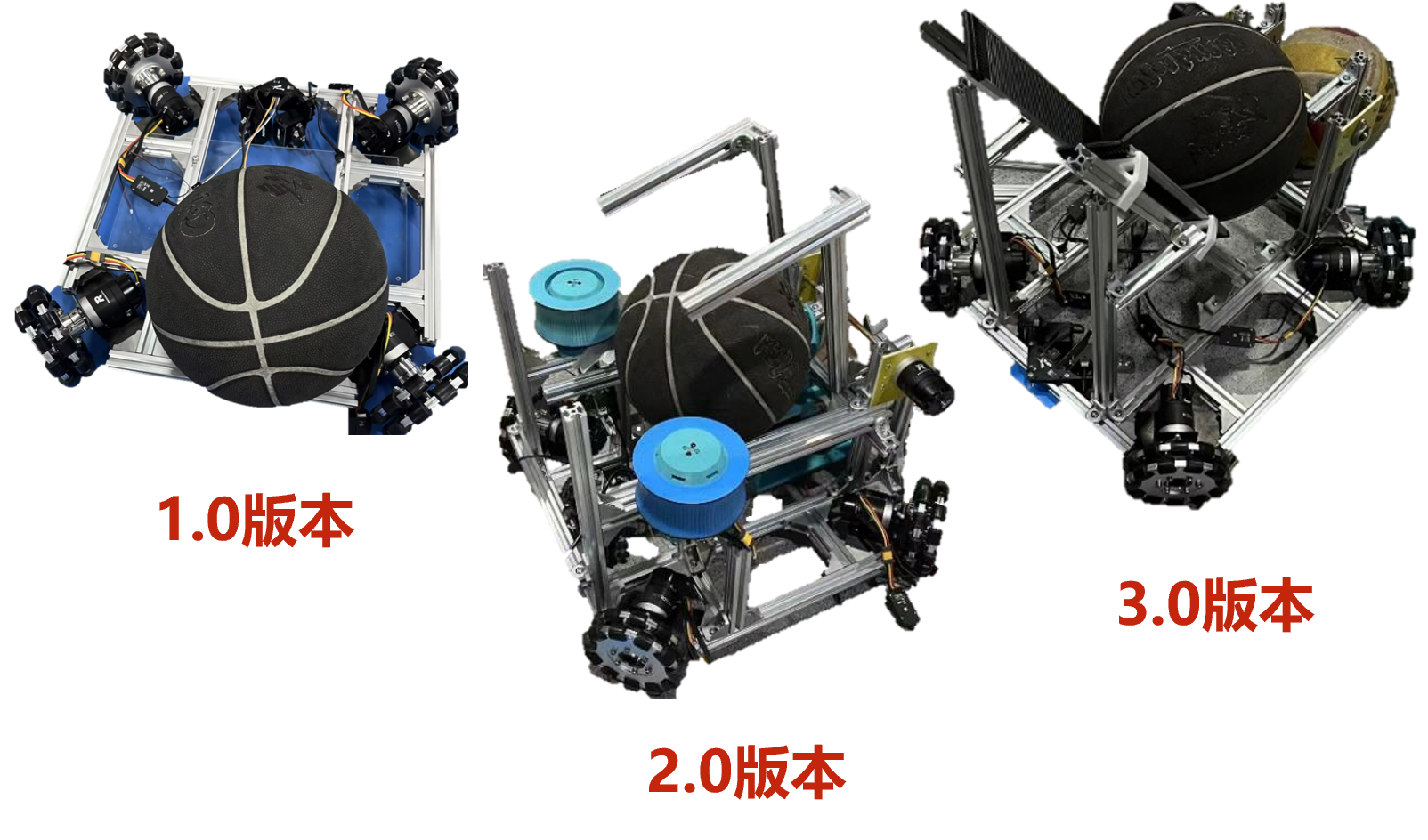
初期版本迭代
发射成功咯!
从0到1的突破往往是最难的
投篮嘿嘿
感言
很遗憾的是没有办法线下参赛了,想不到大四了还这么多事情。
比赛在10.17,10.16要报到;
最离谱的是十个人的队伍只让报销两个人的路费,有点离谱,本来还说去石家庄玩几天的,加上要搞一个培训,不知道能不能去成。
希望学弟学妹能取得一个好成绩,开山之年真的很不容易啊。至少国三是稳了,稳三冲二吧哈哈哈加油!

